カムとは?
カムは運動の方向を変える(例:回転運動→直線運動)、任意の形状を持った機械要素です。直接接触によりローラ等相手側に任意の運動を与えます(出力端における、速度・加速度・躍動などの運動特性を任意に実現することができます)。

カム機構の種類
カム本体の形状により「平面カム」と「立体カム」に分けることができます。
「平面カム」は直進型と回転型に分類され、「立体カム」は端面型・円筒型・円すい型・鼓型に分類されます。ローラギアカムは鼓型の立体カムのひとつになります。
カム本体とフォロアの拘束方法としては、「カム自身の形態による拘束(溝案内、リブ案内、共役機構)」と「外部拘束(バネ、重力など)」があります。







カム

リンク等のメカニズム=作動端(従節)の種類=






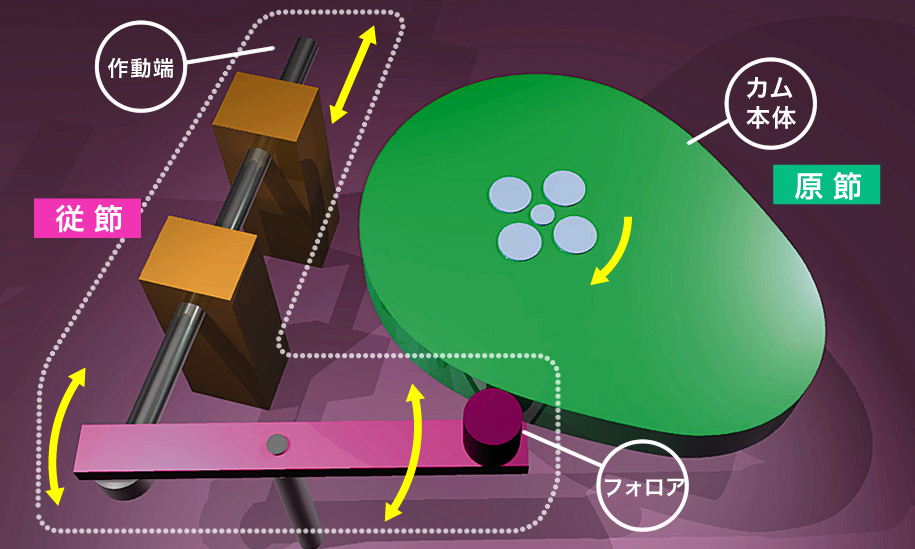
カム機構の仕組み
回転板カムを例にとるとカム本体は中心からの半径が一定ではありません。よって、カム本体が一定の回転運動をする場合でもカム本体に接するフォロアは直動や揺動等他の運動を行います。その運動は中間節の形状によりさらに変位し作動端に伝わります。
このようにカム機構では一定の回転運動を往復運動や複雑な揺動等に変換するのです。
カム機構の特長
高精度のモーションコントロール
カムは「回転角により位置が確定している」構造のため、高精度のモーションコントロールが可能です。特に拘束方法が「カム自身の形態による拘束(内部拘束)」の場合精度が非常に高くなります。
高速化が可能・低振動
同期制御しやすくオーバーラップも可能で、機構のサイクルタイムを縮めることができます。
運動が滑らかなため「振動がきわめて少ない」「機械や製品、金型に対してムダな力がかからない」機構にすることができ、そのため高速化を実現できます。
特に内部拘束のカムは、より高速の運動が可能なります。
小型・軽量・高剛性
シンプルな構造の機構のため「小型」「軽量」「高剛性」の機構を実現できます。
メンテナンスが容易・機械の長寿命・低消費電力
ほかの機械要素と比べ故障が少なくオイル交換のみできわめて安定した動作が可能です。
機械に対してムダな力がかからない機構にすることができるため、機械が長寿命化します。
サーボモータと比べ消費電力が少ないです。